VS2017+OpenCV3.3基于SGBM算法的双目立体视觉、双目测距(双目校正和立体匹配)(文档里包含了测试图片)
”SGBM OpenCV3.3 双目校正 立体匹配“ 的搜索结果
算法的双目立体视觉、双目测距(双目校正和立体匹配)(文档里包含了测试图片)
左右两张图片对相机的内参外参进行标定,然后对图像进行校正,最后通过双目可以得到视觉信息
立体匹配程序,包括基本矩阵求解,极线校正和SSD算法 立体匹配程序,包括基本矩阵求解,极线校正和SSD算法 立体匹配程序,包括基本矩阵求解,极线校正和SSD算法 立体匹配程序,包括基本矩阵求解,极线校正和SSD算法
双目视觉,双目图像测距,双目图像校正,对其,匹配
前些日子做了一个关于双目立体视觉的入门作业,现在在这里总结一下学到的一些知识(写的可能会有很多欠缺的地方,还望海涵!) 本篇博客不涉及双目标定的知识,关于双目标定网上资料很多,大家可以自行查找学习。 ...
基于 Opencv 的透视和鱼眼(全向)相机的立体校正和立体匹配。 本项目的特点是有两种整流方式。 第一种是传统的透视校正,即校正后的图像是透视的,因此可以在一行中应用立体匹配。 然而,由于全向相机的视场(FOV)...
OpenCV实现的计算机视觉立体匹配算法BM和SGBM
使用VS2013和OpenCV3.0,对左右两幅相机得到的棋盘格标定图像进行立体标定和立体校正,为立体匹配和三维重建打下基础;使用VS2013和OpenCV3.0,对左右两幅相机得到的棋盘格标定图像进行立体标定和立体校正,为立体...
本文采用MATLAB标定工具箱和OpenCV3.10来实现双目测距,设备为两个CMOS工业相机和相应的双目云台。 首先感谢CSDN上两位大神前辈邹宇华和scyscyao,虽然是六年前的博客,OpenCV也从1.0的版本更新到了3.1版本,但...

实现立体匹配的过程需要涉及许多步骤,包括双目标定、立体校正、视差计算等。在这篇文章中,将介绍如何使用Python实现立体匹配的基本步骤和技巧。下面的代码实现了从相机标定到立体匹配的完整流程,下面将分别介绍...
双目立体视觉标定以及立体匹配参考图片,可用于立体标定,图像校正,立体匹配算法验证
对立体视觉的双目图像进行极线校正,以实现双目致密匹配 (Of three-dimensional visual image of the binocular epipolar rectification to realize dense binocular matching)



基于双目视觉的立体匹配算法研究
标签: 立体匹配
根据立体匹配原理,采用双目摄像头对图像进行采集,通过对摄像机的标定和图像立体校正、图像分割与立体匹配得到最后的视差图;根据最后的视差图以及算法的速度来评价算法的性能。实验结果表明,图像的视差图十分接近...

运用opencv对双目视觉系统进行标定和校正,精度很高


双目视觉立体匹配算法
标签: 算法
1.双目立体匹配算法 左右视差 以后再细写。 1.1 立体匹配的流程 摄像机标定(包括内参和外参):直接用matlab标定工具箱即可 双目图像的校正(包括畸变校正和立体校正):立体校正opencv samples里给了案 立体...
双目立体匹配入门【一】(理论)
标签: 计算机视觉
立体匹配技术是双目立体3D重建研究的核心和最困难的部分。 首先,通过灰度变换对校准后获得的图像进行增强,以使图像的清晰度达到最佳,然后使用NCC(归一化交叉编译)。 该算法在Matlab环境中执行左右图像对的匹配...
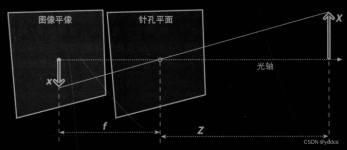
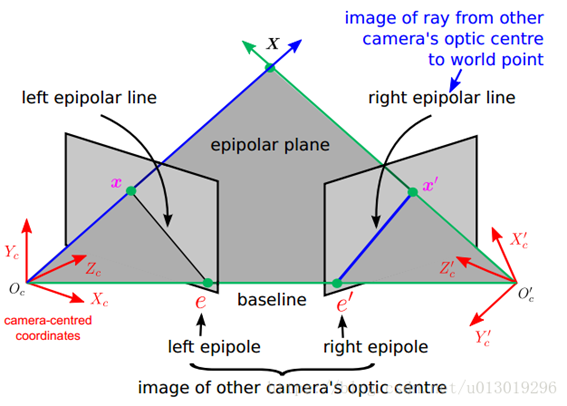
//在学习双目视觉之前,建议大家补充下,双目视觉模型,对极几何的知识,今天只讲源码的流程,以后出一篇对极几何的讲解。 //老规矩先来一段源码 #include "opencv2/core.hpp" #include <opencv2/core/utility....
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地